Yulun Zhuang
Robotics PhD at UMich
About Me
Incoming PhD at UMich in Fall 2024!!
Thank you to everyone who supported and helped me during the application season!
I am a PhD student of Robotics Department at University of Michigan (UMich), where I work on legged robot control and learning with professor Yanran Ding and previously collaborated with Dr. Maani Ghaffari and Dr. Elena Shrestha. Prior to that, I received my bachelor degree from Southern University of Science and Technology (SUSTech), majoring in Robotics Engineering. Advised by professor Wei Zhang, I had a great research experience on MPC and RL of quadruped robots.
I am particularly interested in agile legged locomotion in dynamic environments, with a focus on control and learning methods, and proficient in developing efficient and deployable robotic algorithms. When I'm not immersed in technology, you can find me swimming or playing badminton.
Experience
|
|
Research Assistant
Aug 2022 - Present, University of Michigan, Ann Arbor, MI, US |

|
Software Engineer Intern on Motion Planning
May 2023 - Aug 2023, PlusAI Inc., Santa Clara, CA, US |
|
|
Visiting Student
Aug 2021 - Sep 2021, National University of Singapore, Singapore |

|
Research Intern
Jun 2021 - Jul 2021, Tsinghua University, Beijing, China |
Highlight Projects
Hierarchical RL for MPC of Quadruped Locomotion
|
Motion Planning Practice
|
|

Dynamic Object Removing SLAM with MonoRec
|

Single-Image to Camera Pose with iNeRF and PoseCNN
|
|
Autonomous SLAM and Exploration with MBot
|
Robust Detecting and Palletizing with Robot Arm
|
|
|
 [
[ [
[ [
[ [
[ [
[ [
[ [
[ [
[Publications
Sense, Imagine, Act: Multimodal Perception Improves Model-Based
Reinforcement Learning for Head-to-Head Autonomous Racing
arXiv:2305.04750
Shrestha, E., Reddy, C., Wan, H., Zhuang, Y., & Vasudevan, R.

[
Video
]
[
PDF
]
[
Multimodal Dreamer
]
We present a multimodal perception system combining egocentric LiDAR and RGB camera improves robustness of the world model without requiring additional training data. The resulting multimodal Dreamer agent safely avoided collisions and won the most races compared to other tested baselines in zero-shot head-to-head autonomous racing. |
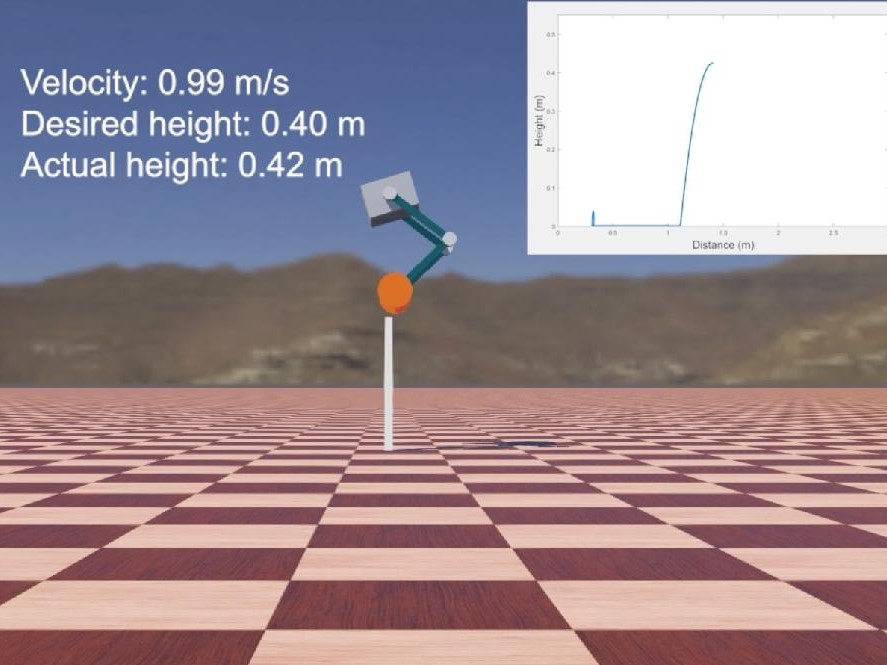
Height Control and Optimal Torque Planning for Jumping with Wheeled-Bipedal Robots
International Conference on Advanced Robotics and Mechatronics. IEEE. 2021
Zhuang, Y., Xu, Y., ... & Fu, C.
 [
Code
]
[
Video
]
[
PDF
]
[
Code
]
[
Video
]
[
PDF
]
We present a wheeled-bipedal jumping dynamical (W-JBD) model to optimize the height control, and the Bayesian optimization for torque planning (BOTP) method based on a joint optimization framework for torque planning to achieve accurate height control and minimal energy cost. |
Wheeled-Bipedal Robot
[
PDF
]
[
View Robot
]
China Patent CN112977666A Jun 2021
W. Zhang, Y. Zhuang, et al.
Connecting Structure and Multi-Hull Ship

China Patent CN212637810U Mar 2021
Y. Zhuang, W. Zhang, et al.
Education
|
|
University of Michigan, US
Aug 2022 - May 2024, Master of Science in Robotics |
|
Southern University of Science and Technology, China
Sep 2018 - Jun 2022, Bachelor of Engineering in Robotics |